Five Axis Manipulator For X Ray With Lead Shielded Chamber
The Handling System is designed for carrying out real time radiographic X-Ray Inspection of cylindrical jobs, having diameter ranging from 10mm to 500mm and the height of the job varying from 100mm to 1000mm.
The X and Y-Axis having 200-mm Stroke Lengths are used for centering the job with respect to the X-Ray and Detector.
The X-Ray Source and Detector have 4000 mm of vertical movement and +/- 15 degrees of tilt movement.
Turn table for the rotation of the job from 0 to 360 degrees.
The entire Five-Axis Manipulator is kept inside a lead shielded (12 to 16mm thick) chamber of 2m X 2.5m X 2.5m with motorized sliding doors.
The control system consists of a personal computer with an encoder counter card and digital I/O card mounted inside PCI slots of the PC. Five axes movements are controlled through RS 485 communication by daisy chaining and Multiplexing 3 Nos. AC VF Drives.
Optical Encoders are provided for all the Five Axes for position feedback.
User-Friendly GUI for Frontline Operation, Data Display and Alarm Indications.
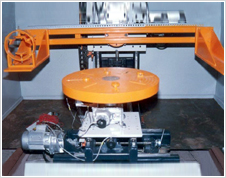
Poolside Sub-Assembly Inspection Bench for Profilometry of Hexagonal Tubes
System is designed for Dimensional Measurements & Profilometry of Hexagonal Tubes placed inside a water pool 11 meter deep.
5 Axes of motion - namely X1, X2, Y, Z, & THETA. Two independent X1 & X2 Axes mounted on the same LM guide, which forms the X-Axis
4.5 meter tall Z-Structure.
Underwater submersible LVDTs, mounted on X1 & X2 Axis, are used to trigger data acquisition at preset value.
Controlled by two PC based 4-Axis Stepper Controller Cards in Auto-Mode, and Handheld Pendant in manual operation.
User-friendly GUI for Motion Control & Data Acquisition and Analysis gives a plot of variation of width across flats as a function of axial distance and corner-to-corner distance as a function of axial distance.
The coordinate data, thus obtained from dimensional measurements is used for reconstruction of a 3D-Wireframe Model in a Solid Modeling Environment.
X-Y-Theta Scanner is used for non-destructive evaluation of Flat Samples (300mm X 300mm) (X-Y Scanning) & Cylindrical Tubes ( L - 300mm, Ø -20mm / 18mm) (Y-Theta Scanning) by using Liquid Helium Cryostat Housing Squid Sensor (Superconducting Quantum Interference Device Magnetometer) to detect magnetic anomalies associated with defects in conducting materials.
The scanning stage is manufactured using partly SS 304 and more with non-metallic plastic composites.
The motion is transmitted through stepper motor driven stages kept at 2 meter distance.
Magnetic Shielding provided with the help Of µ-Metal.
The Control System consists of personal computer driving three Stepper Motors through dedicated Stepper Controllers and Microstepping Drives. Data Acquisition System is interfaced with the motion control software operated through user friendly GUI.
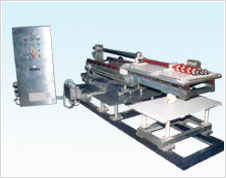
Material Handling System for X-Ray Inspection of Ammunition
The handling system is designed to transfer the ammunitions to be inspected from the loading station to the X-Ray station. The handling system comprises of the following major components :
Horizontal Transporter - Specifications
Stroke Length
:
2500 mm
Pay Load
:
50 kg
Fast Speed
:
7 m/min.
Slow Speed
:
1.7 m/min.
The horizontal transporter is designed for transferring the ammunitions from the loading station to the X-Ray station. The trolley movement is operated by an AC motor & variable speed AC V/F drive.
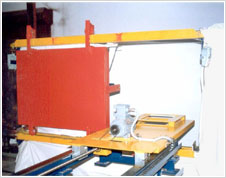
Shutter - Specifications
Lead Thickness
:
40 mm
Movement
:
900 mm
Speed
:
7m/min.
The motorized lead shutter door is mounted on the wall of the X-Ray room and is used to close the window through which the carriage comes out of the X-Ray room. Ac motor is employed to rotate the nut such that the lead screw is moved forward & reverse. The motor & limit switches are flameproof.
Control Panel
It comprises of a stand-alone cabinet which houses, AC V/F Drive, Color Monitor, and Power Supply etc.